Автоматическая станция
«Луна-25», запуск которой намечен на июль 2022 года, должна совершить первую в
истории посадку в районе южного полюса Луны. Главная научная задача – найти в
лунном грунте воду, обнаруженную в полярном районе орбитальными аппаратами.
Ключевую роль в ее решении должен сыграть робот-манипулятор, о создании
которого рассказала руководитель Лаборатории робототехнических систем для
планетных исследований Института космических исследований (ИКИ) РАН Татьяна
Козлова.
Татьяна Олеговна, для
чего потребовался манипулятор на «Луне-25» и почему раньше все наши лунники без
него обходились?
Раньше для забора грунта на лунниках использовали буровые
установки. В то время были требования по забору грунта с глубины до 2 м. Причем
грунт доставлялся для исследований на Землю с помощью возвращаемого аппарата. В
1976 году был последний удачный полет «Луны-24» с такой установкой. Но «Луна-25»
– это в большей степени испытательная миссия для отработки технологии посадки в
районе южного полюса Луны. На ней нет возвращаемого аппарата и масса научного
оборудования ограничена 30 кг. Масса буровой установки составляет около 25 кг,
поэтому было решено вместо нее использовать лунный манипуляторный комплекс с
ковшом и грунтозаборным устройством. Он легкий, весит всего 5,5 кг. Манипулятор
может вырыть траншею, чтобы забрать грунт с глубины до 25 см и загрузить его в приемное
окно прибора для анализа химического и изотопного состава прямо на борту
аппарата. Этот прибор называется ЛАЗМА-ЛР – Лазерный ионизационный и
масс-спектрометр. А буровую установку планируется ставить на следующий аппарат
с миссией посадки на поверхность нашего естественного спутника – «Луна-27».
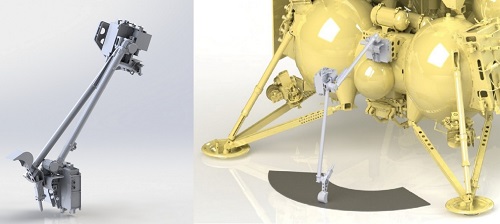
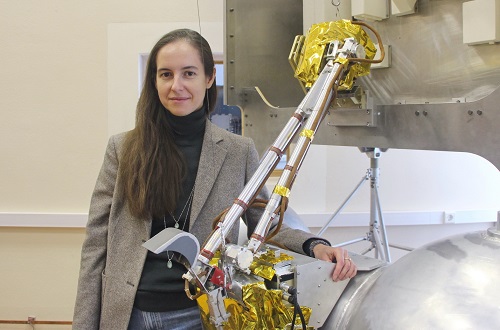
Фото 1. Лунный
манипуляторный комплекс состоит из четырех приводов (азимутального, плеча,
локтя и запястья), двух штанг, кронштейна для установки стереокамер и
спектрометра, а также блока электроники в основании, который крепится к блоку
топливных баков аппарата. Полная масса не превышает 5,5 кг, длина в разложенном
состоянии около 1,6 м, что позволяет осуществлять копание на глубину 25 см. Время
копания траншеи на полную глубину 25 см может занять около часа. Время забора
грунта и доставки от 3 до 5 его грамм в приемное окно прибора ЛАЗМА-ЛР
составляет около 3 мин.
С ковшом для рытья
все понятно, а что представляет собой грунтозаборное устройство?
Грунтозаборное устройство представляет из себя полую трубку
с поршнем внутри, который двигается вверх-вниз с помощью электропривода. У нас
по всем испытаниям получалось, что грунт в этой трубочке уплотняется настолько,
что держится там сам собой, не высыпаясь, а уже над приемным окном прибора
поршень его выталкивает.
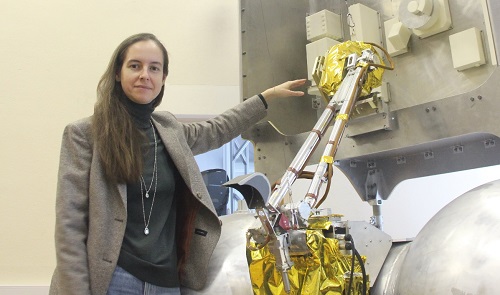
Фото 2. Руководитель
Лаборатории робототехнических систем для планетных исследований ИКИ РАН Татьяна
Козлова показывает место расположения приемного окна прибора ЛАЗМА-ЛР, в
которое должен доставить грунт манипулятор.
Кто разрабатывал и
изготавливал манипулятор?
Манипулятор полностью разрабатывался и изготавливался здесь,
в ИКИ, и он сам, и электроника для него сделаны у нас в лаборатории. Раньше ею руководил
Олег Евгеньевич Козлов, мой отец. Он был главным конструктором и идейным
вдохновителем этого проекта, но, к сожалению, не дожил до этого запуска. Он
скончался в 2017 году, и теперь его дело продолжаю я. У этого манипулятора есть
предыстория: на автоматической межпланетной станции «Фобос-Грунт» тоже стоял
манипулятор. Это была первая подобная разработка ИКИ. «Фобос-Грунт» должен был
доставить на Землю образцы грунта с Фобоса, спутника Марса, но, к сожалению,
его полет в 2011 году закончился неудачей из-за неисправности. Манипулятор для
«Луны-25» – это как бы второе поколение подобных устройств, значительно доработанное.
Насколько отличаются
манипуляторы двух поколений?
На «Фобосе-Грунте» на самом деле стояли два манипулятора,
второй был чуть больше, чем тот, над которым мы работаем сейчас, но по размерам
они сравнимы. А вот по грузоподъемности отличаются. В лунном манипуляторе стоят
более мощные приводы, потому что на Фобосе гравитация почти нулевая и там не
требовалось каких-то значительных мощностей от двигателей, а на Луне гравитация
хотя и составляет всего одну шестую земной, но она есть, поэтому от манипулятора
требуются некоторые усилия.
Но самое главное отличие в том, что для манипулятора
«Фобоса-Грунта» мы не разрабатывали электронику, то есть наша часть это была
сама рука с приводами, а управление осуществлялось от бортовой системы
управления, которая разрабатывалась НПО им. Лавочкина, головной организацией по
созданию всего аппарата. За «Луну-25» в целом тоже отвечает НПО им. Лавочкина,
наше ведущее КБ по межпланетным аппаратам, однако манипулятор – полностью наша
разработка, со всей системой управления, ее алгоритмами, их отработкой.
Много ли использовалось
импортных компонентов?
Когда начиналась разработка этого манипулятора, еще не было
жесткого требования по использованию только отечественных комплектующих,
поэтому электронные компоненты почти все иностранного производства. Конечно,
все это радиационно-стойкая электроника класса Space или Military. Если говорить о «железе», то в
качестве приводов мы используем электродвигатели швейцарской компании Maxon космического
исполнения, со специальными смазками и материалами.
А использовался ли
зарубежный опыт при проектировании манипулятора? Например, вы следили за
работой китайского аппарата «Чанъэ-5», который доставил грунт с Луны в 2020
году?
По китайскому манипулятору данных очень мало, то есть,
естественно, мы видели какие-то их презентации, видео и фотоматериалы, но это и
все. Однако в целом манипуляторы, то есть роботизированные руки, достаточно
широко используются на Земле, поэтому опыт по их проектированию в мире и в
стране накоплен достаточно большой, просто в его использовании для космоса есть
свои нюансы: тепло, радиация, каждый грамм на счету.
Возникали в связи с
этими нюансами какие-то особо сложные вопросы при разработке?
Пришлось много поработать над тепловыми параметрами
манипулятора, потому что он стоит на солнечной стороне аппарата и в дневное
время почти всегда освещен Солнцем. Но при этом есть еще и требования пережить
лунную ночь, когда температура существенно падает. Поэтому приходилось
рассчитывать на очень большой диапазон рабочих температур от минус 80 до плюс
60 градусов Цельсия. На «Фобосе-Грунте» таких проблем, кстати, решать не
приходилось. Чтобы выполнить эти требования, были использованы несколько
интересных технических решений.
Манипулятор изготовлен из алюминиевого сплава АМг6. Для
соблюдения температурного режима обычно используется алюминий с каким-то
покрытием, иногда даже покрывают детали золотом, но мы решили обойтись просто
полированным алюминием. Блок электроники манипулятора покрыт экранно-вакуумной
термоизоляцией (ЭВТИ), но сами движущиеся части таким образом защитить от
перегрева очень сложно, поскольку ткань будет мешать движению сочленений. Мы от
этого отказались, и для поддержания нужного теплового режима оказалось
достаточным использовать полированный алюминий и систему радиаторов.
Раскрываемые радиаторы – это еще одно оригинальное решение
проблемы перегрева. Радиаторы днем открываются, тепло через них сбрасывается и
есть возможность пережить даже самый жаркий полдень, а на ночь закрываются и,
соответственно, тепло через них не сбрасывается. При этом раскрываемые
радиаторы относятся именно к манипулятору, и это не отдельный механизм со
своими приводами, а часть его конструкции. Мы использовали тот факт, что
манипулятор двигается. У него есть так называемые ночная и дневная парковки.
Парковка – это определенное положение манипулятора, в котором радиаторы
ориентируются нужным для поддержания необходимой температуры образом.
Радиаторы представляют собой металлические пластины, покрытые
белой краской с нужными параметрами излучения/поглощения. Сами по себе они
расположены на манипуляторе неподвижно, но за счет его раскладываний и
складываний они также открываются и закрываются, перекрывая друг друга и меняя
площадь излучающей поверхности.
Для проверки эффективности этой системы мы проводили
тепловые испытания с имитатором Солнца, и по их результатам доработали
радиаторы, покрасили их другой краской и чуть-чуть увеличили. Но это
стандартные испытания, которые именно и предназначены для того, чтобы
проверить, достаточен ли теплоотвод.

Фото 3. Радиаторы манипулятора
в закрытом состоянии.
Расскажите подробнее
об этих испытаниях? Что такое имитатор Солнца?
Имитатор Солнца – это набор мощных ламп, которые имитируют
тепловой поток от нашего дневного светила. В Москве есть несколько вакуумных
камер с имитатором Солнца. Мы проводили наши испытания в НПО «Молния». Плюс к
тому там обеспечиваются и криогенные температуры до минус 190°С. Там мы проверяли тепловой режим
манипулятора в штатном положении для перелета и для дневных парковок.
Включается имитатор Солнца, после чего мы дожидаемся момента, когда температуры
всех элементов конструкции стабилизируются, сравниваем эти температуры с нашей
тепловой математической моделью, корректируем ее, чтобы она была адекватна
результатам этих испытаний, и дальше уже рассчитываем тепловое состояние
манипулятора в других положениях, определяем, достаточна ли площадь радиаторов
или мощность нагревателей.
Для испытания Вам
пришлось создавать стенды, имитирующие условия работы на лунной поверхности?
Основной стенд, на котором отрабатывались все алгоритмы
работы манипулятора, представлял собой макет блока баков и панелей посадочного
аппарата, на которых крепится манипулятор. Этот макет нам предоставило НПО им. Лавочкина.
Мы дорабатывали его: была установлена система обезвешивания для манипулятора,
чтобы имитировать одну шестую земной гравитации, – фактически, это система
подвесов на блоках. Были установлены стереокамеры, с помощью которых манипулятор
наводится на нужный участок, и приемное окно прибора ЛАЗМА-ЛР, куда загружается
грунт.

Фото 4. Основной стенд
для испытания манипулятора с системой обезвешивания (видны тросы, на которых
подвешиваются подвижные части). Вверху на панели видны стереокамеры. Ковш
поднят вверх. Внизу под ним расположено грунтозаборное устройство.
Ориентация манипулятора проводится с помощью стационарных
стереокамер на борту аппарата, но кроме них у манипулятора есть и собственная
пара «глаз», так называемая телевизионная система рабочего поля манипулятора,
которая используется для более точного наведения, если ученых заинтересует
какая-то конкретная точка, из которой надо взять пробу грунта. Плюс на
манипуляторе стоит инфракрасный спектрометр, с помощью которого можно изучать
выбранный участок поверхности.
Наведение манипулятора на нужный участок по снимкам
стереокамеры – отдельная большая задача, которая отрабатывалась на этом стенде.
Пожалуй, это самая сложная часть алгоритма.
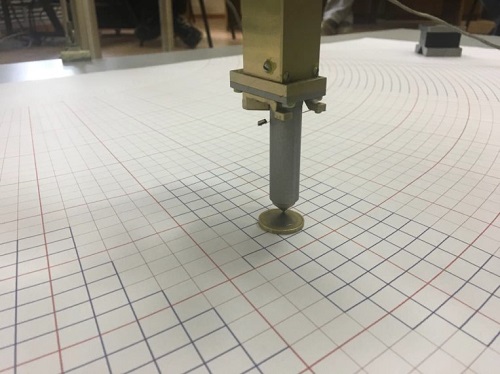
Фото 5. Манипулятор
наводится в зону с характерным размером 15 мм. В качестве объекта при калибровке
использовалась монета с таким диаметром.
Как известно,
основная цель посадки «Луны-25» на южном полюсе – поиски замерзшей воды в
лунном грунте, и хотя сам по себе реголит рыхлый, сможет ли манипулятор
расковырять смерзшийся грунт?
Для проверки этого нами был изготовлен другой стенд – криовакуумная
камера, которая специально разрабатывалась, чтобы можно было работать с мерзлым
грунтом. Создание такого стенда – сама по себе непростая задача, поскольку в
вакуумных камерах вообще очень сложно работать с грунтом, так как вакуумные насосы
должны справляться с довольно большим объемом пыли. Но нами в ИКИ такая камера была
создана, мы в ней проводили испытания манипулятора с мерзлым грунтом. Сам
грунт, имитировавший лунный реголит, нам предоставил ГЕОХИ РАН, где хранится
лунный грунт, доставленный советскими автоматическими аппаратами. Системы обезвешивания,
правда, не было, поскольку для этого камера слишком мала, но даже в этих, чуть
более трудных условиях манипулятор вполне успешно рыл траншеи в замороженном
грунте, содержащем до 1,5 % воды.

Фото 6. Криовакуумный
стенд. Охлаждение грунта проводится до температуры ниже минус 100°С.
Аналог лунного грунта представлял собой смесь измельченного кварцевого песка,
золы и доменных шлаков. ГЕОХИ РАН изготовил около 80 кг такого грунта.
Испытания показали, что при содержании воды в 1,5 % в замороженном грунте
скорость вращения приводов при копании падает в два раза и для успешного
завершения процесса пришлось отключить датчики защиты по скорости.
Разве в шесть раз большая
гравитация, чем на Луне, – это всего лишь чуть более трудные условия для
испытаний манипулятора?
В позиции манипулятора для копания не возникает такой нагрузки
на приводы, что она получается в шесть раз больше в земных условиях. Нагрузка
получается большей, чем в случае с обезвешиванием, но не на много.
С приводами понятно, им
земная гравитация не мешала при испытаниях, ну а как с механической прочностью
манипулятора?
Самые большие нагрузки на конструкцию возникают при запуске.
Это вибрационные нагрузки и именно на них испытывается
конструкторско-доводочный образец. Эти нагрузки превышают те, что возникают и
при посадке, и даже в ходе работы. Поэтому во время запуска и перелета
манипулятор жестко закреплен двумя пирочеками, который подрываются уже после
посадки на Луну, освобождая манипулятор.
Известно, что лунный
грунт имеет свойство налипать на предметы из-за электростатического заряда от
космического излучения. Это его свойство как-то имитировалось?
Это известная проблема, но у нас, к сожалению, не было
макета грунта, который имитировал бы электростатические свойства реголита. Однако
мы проводили другие эксперименты. Мы, например, примораживали ковш к мерзлому
грунту, то есть полностью погружали его в грунт, как в стандартном цикле
копания, но потом останавливали манипулятор в этом положении и дожидались,
когда это все замерзнет. Манипулятор удачно эти испытания проходил. Если он с
мерзлым грунтом справился, то с налипанием тоже как-то справится.
Летное изделие тоже
испытывается таким образом?
Летное изделие испытывается по укороченной программе,
поскольку по полной программе испытывался совершенно идентичный ему
конструкторско-доводочный образец. Вот он испытывается на все максимальные
нагрузки, а с летным изделием, например, нельзя работать с имитатором грунта,
то есть все алгоритмы движения проверяются только в воздухе, без грунта.
Сколько вообще манипуляторов
было создано в процессе испытаний?
В этом году мы изготовили седьмой манипулятор, и это было
уже летное изделие. Но начинается все с натурно-массового макета и теплового
эквивалента. Эти макеты используются в НПО им. Лавочкина для тепловых и
вибрационных испытаний макета всего аппарата. Далее мы изготовили два
технологических макета: один – для НПО им. Лавочкина для проверок циклограмм
работ в составе аппарата, и второй для отработки на наших стендах. И кроме
того, изготовлены три штатных изделия: одно для конструкторско-доводочных
испытаний, второе запасное и третье штатное, которое и отправится на Луну.
Разработку манипулятора для «Луны-25» мы активно начали в
2015 году, и все эти семь лет почти непрерывно шли доводочные испытания.
Продолжаются они и сейчас. Идет отработка рабочих циклограмм.
Можно ли будет
управлять этим манипулятором вручную, в телеоператорном режиме?
Вручную управлять лунным манипулятором с Земли сложно,
потому что все-таки из-за расстояния до Луны есть задержка сигнала, около 5 с.
К тому же сеансы связи не всегда совпадают с сеансами работы, поэтому если
говорить про штатную работу, то планируется, что она будет осуществляться в
автоматическом режиме по заранее написанной и переданной на борт циклограмме.
Но если что-то пойдет нештатно, то выполнение программы будет автоматически
прервано. Если от срабатывания датчиков ограничения по току или скорости приводов
манипулятор останавливается, наткнувшись, например, на большой камень, то тогда
оператор на Земле принимает решение, что делать дальше. В таком случае есть
возможность посылать для выполнения команду за командой, чтобы выйти из
какой-то сложных ситуаций.

Фото 7. Во время
испытаний стальной цилиндр массой 5 кг имитировал столкновение с камнем.
Манипулятор смог его сдвинуть и произвести забор грунта.
Как вы будете
работать после посадки «Луны-25»?
Мы обязательно будем сопровождать работу манипулятора. Соответственно,
у нас в институте есть центр управления, и мы можем получать и анализировать всю
телеметрию с Луны, после чего будем готовить набор команд, то есть циклограмму,
для загрузки в следующий сеанс связи. Эти циклограммы НПО им. Лавочкина получает
от нас и засылает на аппарат. Как раз сейчас у нас идут тренировки по этому
взаимодействию.
У нас в ИКИ на стенде остается первый конструкторско-доводочный
образец, на котором мы будем все это проверять до отсылки команд на Луну, то
есть фактически это будет машина сопровождения.
Вы будете в прямом
эфире видеть всю телеметрию?
Не совсем в прямом эфире, потому что аппарат садится близко
к полюсу, а там зона радиосвязи покрывает не 100 % времени, поэтому будут перерывы
связи с аппаратом. По этой причине возможен разрыв в несколько часов между
отсылкой команд и получением телеметрии об их выполнении.
Но, разумеется, в первые лунные сутки после посадки, когда
мы, условно говоря, будем учиться копать на Луне в реальных условиях, мы планируем,
что работа манипулятора будет подстраиваться под сеансы связи, чтобы мы могли
все видеть онлайн. Но дальше, если все будет удачно и начнется штатная работа, уже
можно будет засылать перечень команд на сутки, и манипулятор будет работать автоматом.
Беседовал Леонид
Ситник, редакция сайта РАН.
Справка. «Луна-25» – автоматическая межпланетная
станции для исследования верхнего слоя поверхности в районе южного полюса Луны,
лунной экзосферы и отработки технологий посадки и забора грунта. Космический
аппарат «Луна-25» создается АО «НПО Лавочкина». Головная организация по
научной полезной нагрузке – ИКИ РАН. Научный руководитель проекта –
академик Лев Зеленый. Запуск намечен на июль 2022 г. с космодрома
«Восточный» ракетой-носителем «Союз-2/1б» с разгонным блоком «Фрегат».
Комплекс
научной аппаратуры КА «Луна-25»:
– система
технического зрения СТС-Л (ИКИ РАН);
– лунный
манипуляторный комплекс ЛМК (ИКИ РАН);
– нейтронный
и гамма-детектор АДРОН-ЛР для исследований состава реголита на
глубину до 1 м (ИКИ РАН);
– инфракрасный
спектрометр ЛИС-ТВ-РПМ для исследования минералогического состава
поверхности Луны (ИКИ РАН);
– лазерный
масс-спектрометр ЛАЗМА-ЛР для прямого исследования образцов реголита
(ИКИ РАН);
– ионный
энерго-масс-анализатор АРИЕС-Л для изучения состава лунного реголита
(ИКИ РАН);
– пылевой
монитор ПмЛ для исследования плазменно-пылевого приповерхностного
слоя (ИКИ РАН);
– система
контроля электропитания, хранения данных научного оборудования и передачи
управляющих команд БУНИ (ИКИ РАН);
– система
обеспечения высокоточной посадки PILOT-D (EKA).